根据国际机器人协会的调查数据显示,全球工业界只解决了3%至4%的规则、刚性物品的自动化生产搬运问题,剩余96%左右的柔性异形、易损物品仍使用人工上下料。这意味着软体机器人领域的发展潜力惊人,以及它背后有着“蓝海”般不可估量的市场。
世界首次!中国软体机器人突破万米级深潜
太平洋马里亚纳海沟,深度可以达到1万多米。由于地处板块俯冲地带,海底地质运动非常活跃,海沟深处水压高、完全黑暗、温度低、含氧量低,是公认的地球上环境最恶劣的区域之一。

2019年底,就是在这里,浙江大学航空航天学院的李铁风教授,克服了大风大浪的极端恶劣天气,带领团队对一外型酷似海鱼的仿生软体机器人进行了测试,结果表现优异。

10900米深海测试,软体机器人每秒自驱动一次,试验各项测试数据完全达到预定目标。这是人类研制的软体机器人自驱动试验在太平洋马里亚纳海沟创下的新纪录,也是我国研发软体机器人首次突破万米级深潜。








浙江大学航空航天学院教授李铁风
在环境恶劣的马里亚纳海沟进行的这项测试研究,成果被作为封面文章刊发在了国际顶级期刊《自然》杂志上。不仅为深海探索科考、环境监测和资源探测提供了解决方案,更为复杂环境下机器人及智能系统的设计提供了新思路。
软体机器人像鱼儿一样在深海遨游,看似很轻松,但背后却需要克服海底洋流、低温、压力等各种不利条件。选用什么材料、采用什么动力、怎样进行设计,一个个难题都需要李铁风他们逐个攻克。







让李铁风团队非常感兴趣的是,狮子鱼的身体虽然很柔软,但却能悠闲自得地在七八千米的深海里游动,仿佛深海的低温、高压强对它没有任何影响。

李铁风他们随即对狮子鱼全身做了一个CT扫描,发现狮子鱼的骨骼特点和结构,跟普通鱼类大有不同。





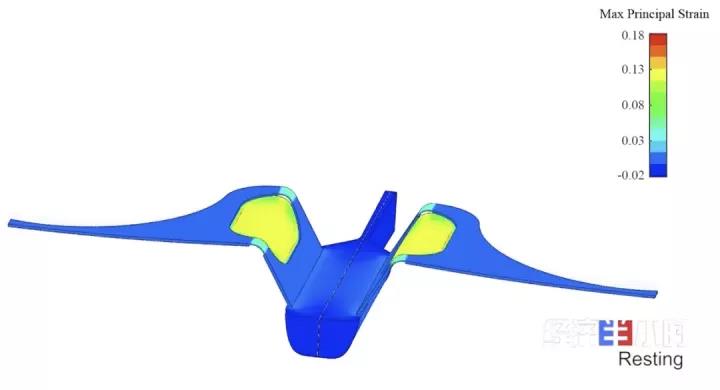
受狮子鱼细碎骨骼的特点和结构的启发,他们对软体机器人形状进行了整体设计,原材料主要采用柔软的硅胶。

为了把一整块电子元器件、电路板放到软体机器人身体里面,李铁风他们化整为零,采用不同角度、方向,分散均衡受力,以适应1万米深海的低温和高压强。

通过人工肌肉的驱动,收缩和舒张会带动翅膀上下拍动,让软体机器人像鱼儿一样游动起来。
鱼鳍翼的动力来自软体机器人内部的锂电池驱动。而锂电池的电压只有4.2伏,但鱼鳍翼要实现在深海里摆动,电压需要到七八千伏,怎样才能够在深海条件下,实现这一看似不可能完成的任务呢?







面对1万米深海高压、低温的环境,如果长时间游动,软体机器人的鱼鳍翼会变得僵硬,游动会变慢甚至停止。为了解决这一难题,李铁风他们还对鱼鳍翼的核心材料,也叫“人工肌肉”,进行了专门设计。




难题一个个被攻克,李铁风他们对于软体机器人的今后发展,除了深海科考,也有自己的愿景。



控制力度达到微米级,国产软体夹爪能轻松夹取生鸡蛋黄
仿生软体机器人在万米海沟可以像鱼儿一样遨游,为人类探索深海的秘密创造了无限可能。另一款已经广泛应用在工业制造领域的软体机器人——软体夹爪也非常神奇。这个安装在机械臂下的软体夹爪,能轻松夹取生鸡蛋黄。









软体夹爪灵活多变,如今应用在了食品、生鲜、汽车配件、3C产品等多个行业的生产加工环节。可以说很多异形、易破损的分拣包装都可以采用这个软体夹爪来完成。但目前全球只有屈指可数的几家公司,在研制生产这样的软体机器人。











36岁的高少龙,是这家软体机器人公司的联合创始人之一。5年前,他还是北京航空航天大学的一名老师。当他偶然看到国外一段介绍软体机器人简单原理的视频,就深深被吸引,并在2016年辞掉大学老师的工作开始创业,却没想到研发的难度远远超出了他们的预期。不仅没有现成的参考样板,没有行业技术标准,甚至连软体机器人结构部件的名称,在业内都没有统一的说法。








高少龙他们不肯轻易认输,测数据、建模型、搭架构,大家都开足了马力,分头攻坚克难。针对普通硅胶太软的缺陷,首先他们攻克的就是软体夹爪的材料问题。





北京软体机器人科技有限公司材料研发组组长许娜
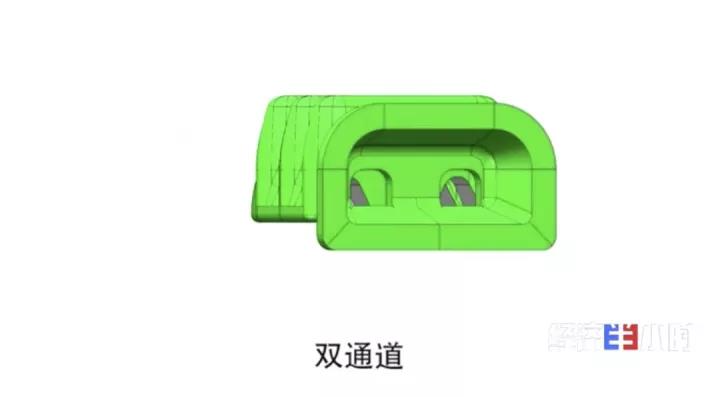
材料问题解决了,但软体夹爪的气体驱动部分又有新的难题:软体夹爪是靠高压气体来控制驱动的,但高压气体进入软体夹爪内部空间时,容易让夹取物品的一面和施加压力弯曲的一面,两面都鼓起来。这样一来,夹取物品的一面,跟物品的接触面积就减少了,软体夹爪会出现抓不牢、抓不稳物品的现象。
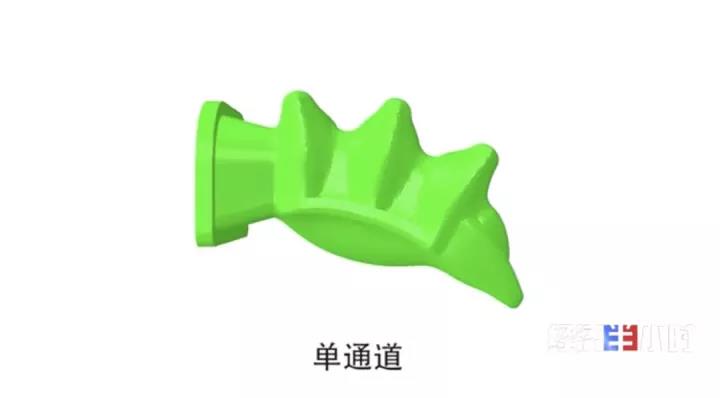
研发人员又在软体夹爪内部结构上动起了脑筋,他们将传统的单通道结构改为双通道设计。无论怎么动,它下面这个面都是平整的,可以实现与被抓实物非常好地接触。
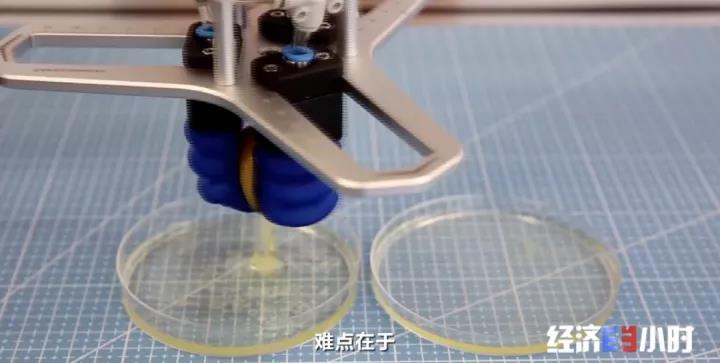
这个巧妙的设计,攻克了软体夹爪气体驱动的结构难题,但也给生产制造工艺带来很大挑战,很难采用传统模具方式来制造。
北京软体机器人科技有限公司生产监理王冈
经过千百次的反复试验后,研发人员最终仿照金属精密铸造的消失模工艺,达到了一次成型。






目前,他们公司的产品已经卖给国内外约300家客户,涉及国家和地区近20个。每年销售额按5至6倍的速度在增长。
北京软体机器人科技有限公司总经理高少龙表示,第三方机构做过测算,大概软体机器人带来的全球市场规模是8.7万亿美元(约合人民币56万亿元)。





半小时观察:“软功夫”还需“真实力”
科研工作者们通过潜心研究、大胆探索,参照深海生物的体质特质,将“生命奥秘”化作“机器之力”,还通过材料、结构的创新,使软体机器人的应用场景遍布食品、生鲜、汽车配件、3C产品等多个行业的生产环节,产品远销二十多个国家和地区。
我们知道,全球工业机器人市场曾经被几家国际巨头牢牢把持,但在软体机器人的市场争夺和技术开发中,中国的科研力量却具备了后发优势,“软功夫”还需“真实力”,我们期待着在不久的将来,软体机器人的“中国潮”能够风起云涌。